Acelerar un punto más cercano en un algoritmo paraboloide hiperbólico
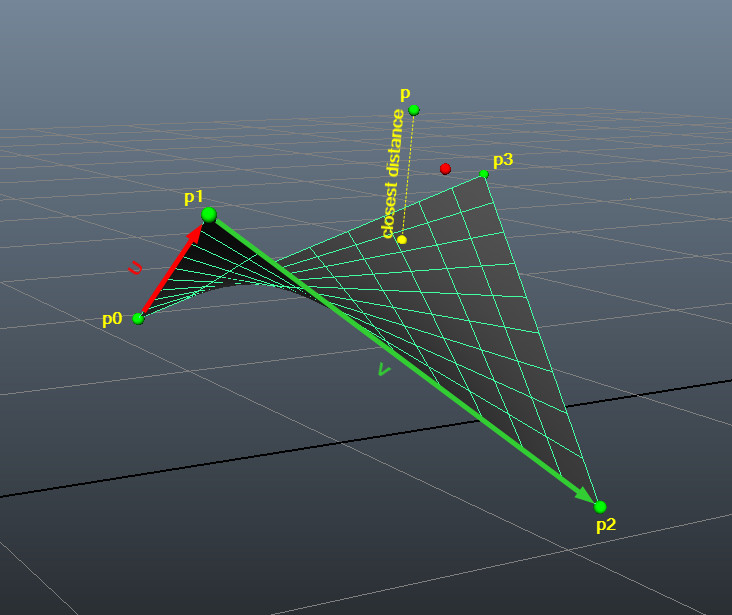
Escribí una secuencia de comandos de python que encuentra los cordones UV del punto más cercano en la superficie desde un punto de consulta (p). La superficie está definida por cuatro bordes lineales hechos de cuatro puntos conocidos (p0, p1, p2, p3) listados en sentido contrario a las agujas del reloj.
(Por favor ignora la bolita roja)
El problema con mi enfoque es que es muy lento (~ 10 segundos para hacer 5000 consultas con un umbral de baja precisión).
Estoy buscando un mejor enfoque para lograr lo que quiero, o sugerencias para hacer que mi código sea más eficiente. Mi única restricción es que debe estar escrito en python.
import numpy as np
# Define constants
LARGE_VALUE=99999999.0
SMALL_VALUE=0.00000001
SUBSAMPLES=10.0
def closestPointOnLineSegment(a,b,c):
''' Given two points (a,b) defining a line segment and a query point (c)
return the closest point on that segment, the distance between
query and closest points, and a u value derived from the results
'''
# Check if c is same as a or b
ac=c-a
AC=np.linalg.norm(ac)
if AC==0.:
return c,0.,0.
bc=c-b
BC=np.linalg.norm(bc)
if BC==0.:
return c,0.,1.
# See if segment length is 0
ab=b-a
AB=np.linalg.norm(ab)
if AB == 0.:
return a,0.,0.
# Normalize segment and do edge tests
ab=ab/AB
test=np.dot(ac,ab)
if test < 0.:
return a,AC,0.
elif test > AB:
return b,BC,1.
# Return closest xyz on segment, distance, and u value
p=(test*ab)+a
return p,np.linalg.norm(c-p),(test/AB)
def surfaceWalk(e0,e1,p,v0=0.,v1=1.):
''' Walk on the surface along 2 edges, for each sample segment
look for closest point, recurse until the both sampled edges
are smaller than SMALL_VALUE
'''
edge0=(e1[0]-e0[0])
edge1=(e1[1]-e0[1])
len0=np.linalg.norm(edge0*(v1-v0))
len1=np.linalg.norm(edge1*(v1-v0))
vMin=v0
vMax=v1
closest_d=0.
closest_u=0.
closest_v=0.
ii=0.
dist=LARGE_VALUE
for i in range(int(SUBSAMPLES)+1):
v=v0+((v1-v0)*(i/SUBSAMPLES))
a=(edge0*v)+e0[0]
b=(edge1*v)+e0[1]
closest_p,closest_d,closest_u=closestPointOnLineSegment(a,b,p)
if closest_d < dist:
dist=closest_d
closest_v=v
ii=i
# If both edge lengths <= SMALL_VALUE, we're within our precision treshold so return results
if len0 <= SMALL_VALUE and len1 <= SMALL_VALUE:
return closest_p,closest_d,closest_u,closest_v
# Threshold hasn't been met, set v0 anf v1 limits to either side of closest_v and keep recursing
vMin=v0+((v1-v0)*(np.clip((ii-1),0.,SUBSAMPLES)/SUBSAMPLES))
vMax=v0+((v1-v0)*(np.clip((ii+1),0.,SUBSAMPLES)/SUBSAMPLES))
return surfaceWalk(e0,e1,p,vMin,vMax)
def closestPointToPlane(p0,p1,p2,p3,p,debug=True):
''' Given four points defining a quad surface (p0,p1,p2,3) and
a query point p. Find the closest edge and begin walking
across one end to the next until we find the closest point
'''
# Find the closest edge, we'll use that edge to start our walk
c,d,u,v=surfaceWalk([p0,p1],[p3,p2],p)
if debug:
print 'Closest Point: %s'%c
print 'Distance to Point: %s'%d
print 'U Coord: %s'%u
print 'V Coord: %s'%v
return c,d,u,v
p0 = np.array([1.15, 0.62, -1.01])
p1 = np.array([1.74, 0.86, -0.88])
p2 = np.array([1.79, 0.40, -1.46])
p3 = np.array([0.91, 0.79, -1.84])
p = np.array([1.17, 0.94, -1.52])
closestPointToPlane(p0,p1,p2,p3,p)
Closest Point: [ 1.11588876 0.70474519 -1.52660706]
Distance to Point: 0.241488104197
U Coord: 0.164463481066
V Coord: 0.681959858995