A * Поиск пути в гексагональной сетке
Может кто-нибудь указать мне на простой пример, который реализует* Алгоритм поиска пути нашестиугольный сетка (в JS). Я заставил его работать на квадратной сетке, однако все мои попытки заставить его работать на шестиугольной сетке потерпели неудачу.
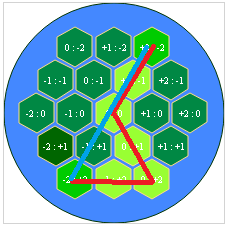
Вот так выглядит моя сетка:
Я использую ту же технику, чтобы нарисовать сетку и генерировать координаты, как показано в этомтема.
Вот данные координат сетки вместе с начальными, конечными координатами:
[0, 0] , [0, 1], [0, 2],
[1, 0], [1, 1], [1, 2], [1, 3],
[2, 0], [2, 1], [2, 2], [2, 3], [2, 4],
[3, 0], [3, 1], [3, 2], [3, 3],
[4, 0], [4, 1], [4, 2]
start_point: [0,2]
end_point: [4.0]
После обновления расчета манхэттенского расстояния:
var dx = pos1[0] - pos0[0];
var dy = pos1[1] - pos0[1];
var dist;
if ( Math.sign(dx) == Math.sign(dy) ){
dist = Math.abs (dx + dy);
}else{
dist = Math.max(Math.abs(dx), Math.abs(dy))
}
return dist;
Я получаю этот результат:
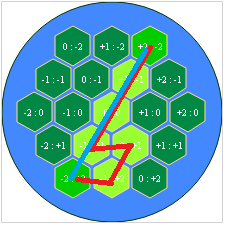
а также способ, которым я вычисляю кратчайший путь:
if (!Array.prototype.remove) {
Array.prototype.remove = function(from, to) {
var rest = this.slice((to || from) + 1 || this.length);
this.length = from < 0 ? this.length + from : from;
return this.push.apply(this, rest);
};
}
var astar = {
init: function(grid) {
for(var x = 0; x < grid.length; x++) {
for(var y = 0; y < grid[x].length; y++) {
grid[x][y].f = 0;
grid[x][y].g = 0;
grid[x][y].h = 0;
//grid[x][y].content = false;
grid[x][y].visited = false;
grid[x][y].closed = false;
grid[x][y].debug = "";
grid[x][y].parent = null;
console.log([grid[x][y].coords[0],grid[x][y].coords[1]])
}
}
},
search: function(grid, start, end, heuristic) {
this.init(grid);
heuristic = heuristic || this.manhattan;
var openList = [];
//// find the start and end points in the grid ////
start = grid[start.pos[0]][start.pos[1]];
end = grid[end.pos[0]][end.pos[1]];
console.log( start, end )
openList.push(start);
while(openList.length > 0) {
// Grab the lowest f(x) to process next
var lowInd = 0;
for(var i=0; i<openList.length; i++) {
if(openList[i].f < openList[lowInd].f) { lowInd = i; }
}
var currentNode = openList[lowInd];
// End case -- result has been found, return the traced path
if( currentNode == end ) {
var curr = currentNode;
var ret = [];
while(curr.parent) {
ret.push(curr);
curr = curr.parent;
}
return ret.reverse();
}
// Normal case -- move currentNode from open to closed, process each of its neighbors
openList.remove( lowInd );
currentNode.closed = true;
var neighbors = this.neighbors(grid, currentNode);
for(var i=0; i<neighbors.length;i++) {
var neighbor = neighbors[i];
if( neighbor.closed || neighbor.content == 2 ) { // not a valid node to process, skip to next neighbor
continue;
}
// g score is the shortest distance from start to current node, we need to check if
// the path we have arrived at this neighbor is the shortest one we have seen yet
var gScore = currentNode.g + 1; // 1 is the distance from a node to it's neighbor
var gScoreIsBest = false;
if(!neighbor.visited) {
// This the the first time we have arrived at this node, it must be the best
// Also, we need to take the h (heuristic) score since we haven't done so yet
gScoreIsBest = true;
neighbor.h = heuristic(neighbor.coords, end.coords);
neighbor.visited = true;
openList.push(neighbor);
}
else if(gScore < neighbor.g) {
// We have already seen the node, but last time it had a worse g (distance from start)
gScoreIsBest = true;
}
if(gScoreIsBest) {
// Found an optimal (so far) path to this node. Store info on how we got here and just how good it really is. ////
neighbor.parent = currentNode;
neighbor.g = gScore;
neighbor.f = neighbor.g + neighbor.h;
neighbor.debug = "F: " + neighbor.f + "<br />G: " + neighbor.g + "<br />H: " + neighbor.h;
}
}
}
// No result was found -- empty array signifies failure to find path
return [];
},
manhattan: function(pos0, pos1) { //// heuristics : use manhattan distances ////
var dx = pos1[0] - pos0[0];
var dy = pos1[1] - pos0[1];
return Math.abs (dx + dy);
},
neighbors: function(grid, node) {
var ret = [];
var x = node.coords[0];
var y = node.coords[1];
if(grid[x-1] && grid[x-1][y] ) {
ret.push(grid[x-1][y]);
}
if( grid[x+1] && grid[x+1][y] ) {
ret.push(grid[x+1][y]);
}
if( grid[x][y-1] && grid[x][y-1] ) {
ret.push(grid[x][y-1]);
}
if( grid[x][y+1] && grid[x][y+1] ) {
ret.push(grid[x][y+1]);
}
return ret;
}
};Пытался найти хорошие примеры или документы в интернете, но не смог найти ничего полезного.