Выравнивание захваченных изображений глубины и RGB
Там были предыдущие вопросы (Вот,Вот а такжеВот) относится к моему вопросу, однако мой вопрос имеет другой аспект, которого я не видел ни в одном из ранее заданных вопросов.
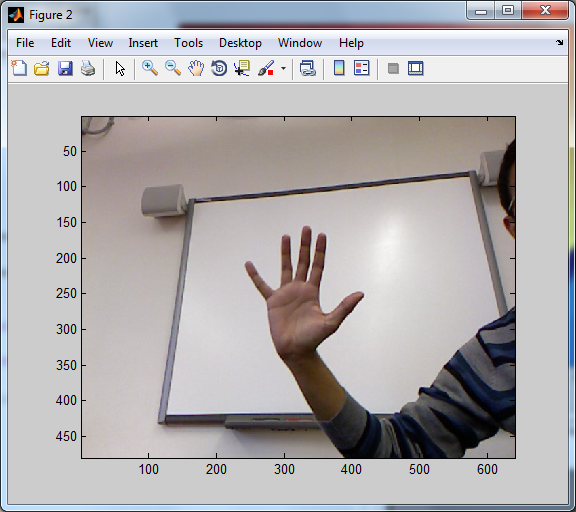
Я получил набор данных для своих исследований с использованием датчика глубины Kinect. Этот набор данных находится в формате изображений .png для глубины и потока rgb в определенный момент. Чтобы дать вам больше идеи, ниже приведены кадры:

РЕДАКТИРОВАТЬ: я добавляю вывод обнаружения края здесь.
Выход обнаружения Sobel Edge для:
RGB Image
Глубина изображения
Теперь я пытаюсь выровнять эти два кадра, чтобы получить объединенное изображение RGBZ.
У меня нет сведений о характеристиках камеры или расстоянии между датчиками RGB и ИК.
Есть ли метод, который можно применить, чтобы сопоставить значения RGB с соответствующими значениями Z?
Одна из идей, которые у меня есть, это использовать края на обоих изображениях и попытаться сопоставить их.