Преобразуйте кадр так, как если бы он был взят сверху, используя OpenCV
Я работаю над проектом по оценке местоположения БПЛА (квадрокоптера) с использованием метода оптического потока. В настоящее время у меня есть код, который используетfarneback алгоритм от OpenCV. Текущий код работает нормально, когда камера всегда указывает на землю.
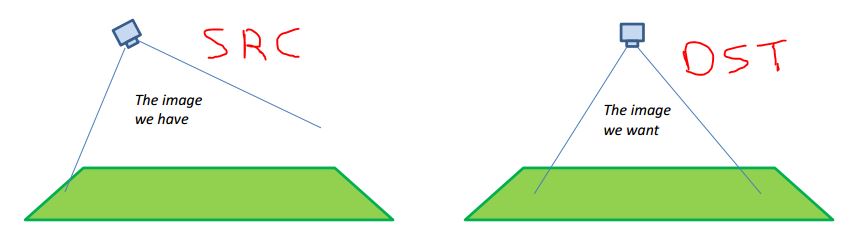
Теперь я хочу добавить поддержку в случае, когда камера не направлена прямо вниз - это означает, что у квадрокоптера теперь есть шаг / крен / рыскание (углы Эйлера). Квадрокоптеры углов Эйлера известны, и я ищу метод для вычисления и применения необходимого преобразования на основе известных текущих углов Эйлера. Таким образом, полученное изображение будет таким, как если бы оно было снято сверху (см. Изображение ниже).
Я нашел методы, которые вычисляют преобразование при наличии 2 наборов (источник и назначение) из 4 углов с помощьюfindHomography или жеgetPerspectiveTransform функции от OpenCV. Но я не смог найти никаких методов, которые могли бы сделать это, зная только угол Эйлера (потому что я не знаю corenrs целевого изображения).
Поэтому мой вопрос в том, какой метод я могу использовать и как сделать так, чтобы кадр был таким, как если бы он был взят сверху, используя только углы Эйлера и высоту камеры от земли, если это необходимо?
Для того, чтобы продемонстрировать, что мне нужно:
Соответствующая часть моего текущего кода ниже:
for(;;)
{
Mat m, disp, warp;
vector<Point2f> corners;
// take out frame- still distorted
cap >> origFrame;
// undistort the frame using the calibration parameters
cv::undistort(origFrame, undistortFrame, cameraMatrix, distCoeffs, noArray());
// lower the process effort by transforming the picture to gray
cvtColor(undistortFrame, gray, COLOR_BGR2GRAY);
if( !prevgray.empty() )
{
// calculate flow
calcOpticalFlowFarneback(prevgray, gray, uflow, 0.5, 3/*def 3 */, 10/* def 15*/, 3, 3, 1.2 /* def 1.2*/, 0);
uflow.copyTo(flow);
// get average
calcAvgOpticalFlow(flow, 16, corners);
// calculate range of view - 2*tan(fov/2)*distance
rovX = 2*0.44523*distanceSonar*100; // 2 * tan(48/2) * dist(cm)
rovY = 2*0.32492*distanceSonar*100; // 2 * tan(36/2) * dist(cm)
// calculate final x, y location
location[0] += (currLocation.x/WIDTH_RES)*rovX;
location[1] += (currLocation.y/HEIGHT_RES)*rovY;
}
//break conditions
if(waitKey(1)>=0)
break;
if(end_run)
break;
std::swap(prevgray, gray);
}
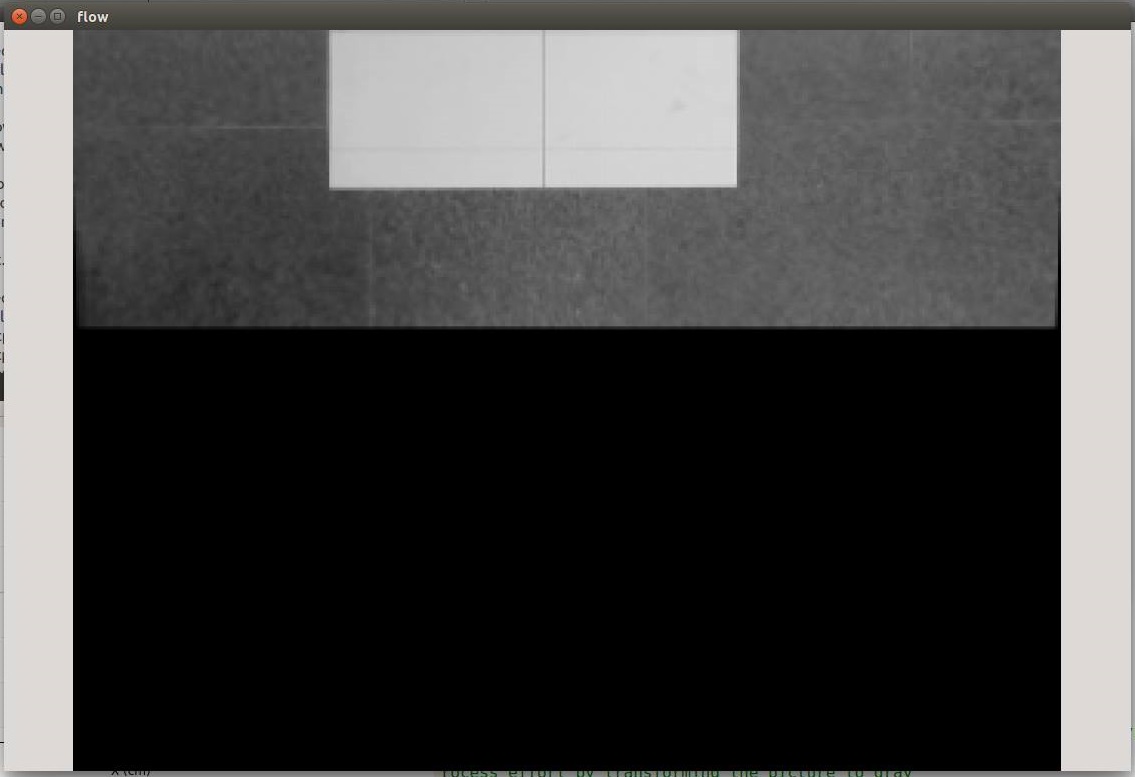
После успешного добавления поворота мне все еще нужно отцентрировать изображение (и не выходить за рамки окна, как показано ниже). Я думаю, мне нужен какой-то перевод.Я хочу, чтобы центр исходного изображения находился в центре целевого изображения. Как я могу добавить это?
Функция вращения, которая работает:
void rotateFrame(const Mat &input, Mat &output, Mat &A , double roll, double pitch, double yaw){
Mat Rx = (Mat_<double>(3, 3) <<
1, 0, 0,
0, cos(roll), -sin(roll),
0, sin(roll), cos(roll));
Mat Ry = (Mat_<double>(3, 3) <<
cos(pitch), 0, sin(pitch),
0, 1, 0,
-sin(pitch), 0, cos(pitch));
Mat Rz = (Mat_<double>(3, 3) <<
cos(yaw), -sin(yaw), 0,
sin(yaw), cos(yaw), 0,
0, 0, 1);
Mat R = Rx*Ry*Rz;
Mat trans = A*R*A.inv();
warpPerspective(input, output, trans, input.size());
}
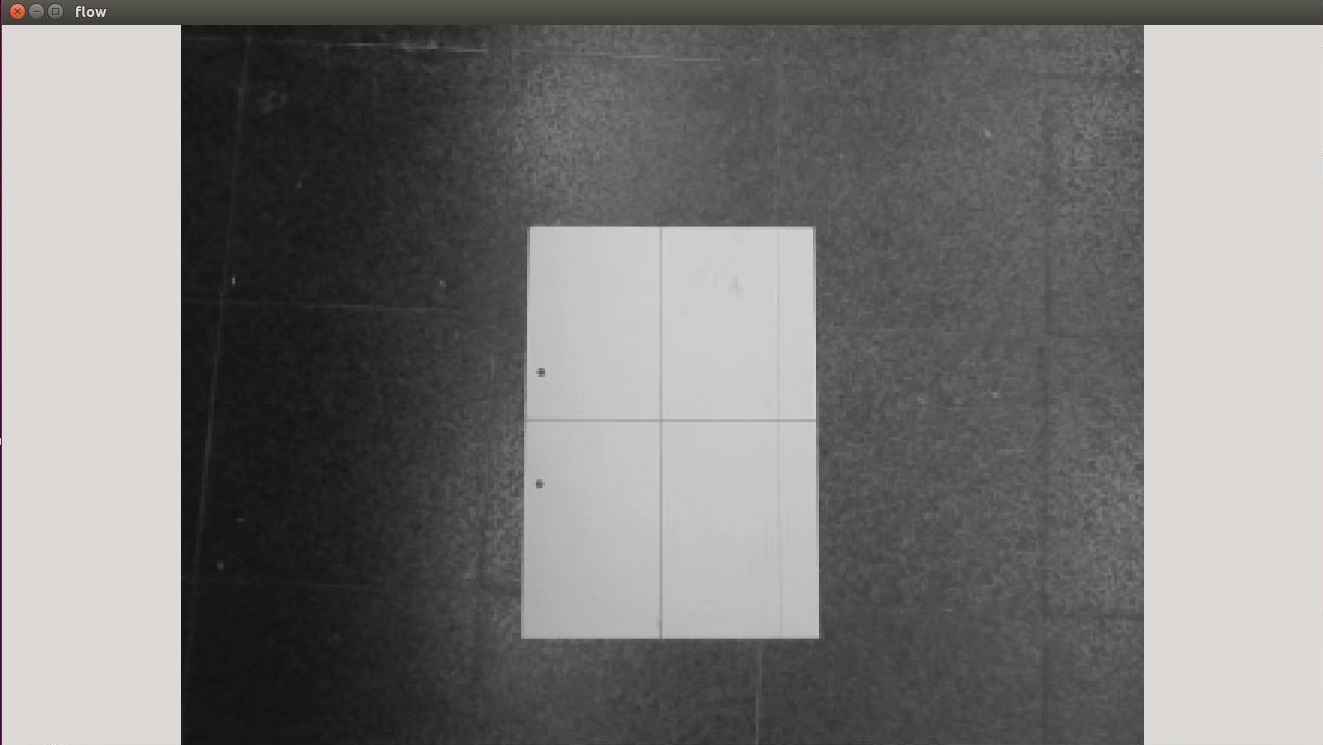
Когда я запускаю его сrotateFrame(origFrame, processedFrame, cameraMatrix, 0, 0, 0); Я получаю изображение, как ожидалось:
Но когда я бегу с 10 градусов в кренеrotateFrame(origFrame, processedFrame, cameraMatrix, 20*(M_PI/180), 0, 0);, Изображение выходит из окна фрейма: